Dense forest is tougher on GNSS than it looks: canopy blocks most signals, and the few you keep line up along the road-so lateral geometry gets weak. In this post we show a reliability-first approach using Minimum Detectable Bias (MDB), geometry-aware weighting, and tightly-coupled GNSS/IMU to avoid “fixed-but-wrong” jumps. Result: stable along-track/vertical, cautious lateral that tightens fast when the sky opens. Field-tested on Darmstadt/Frankfurt drives (Javad Triumph-LS + Xsens MTi G-700).

Short intro and dataset
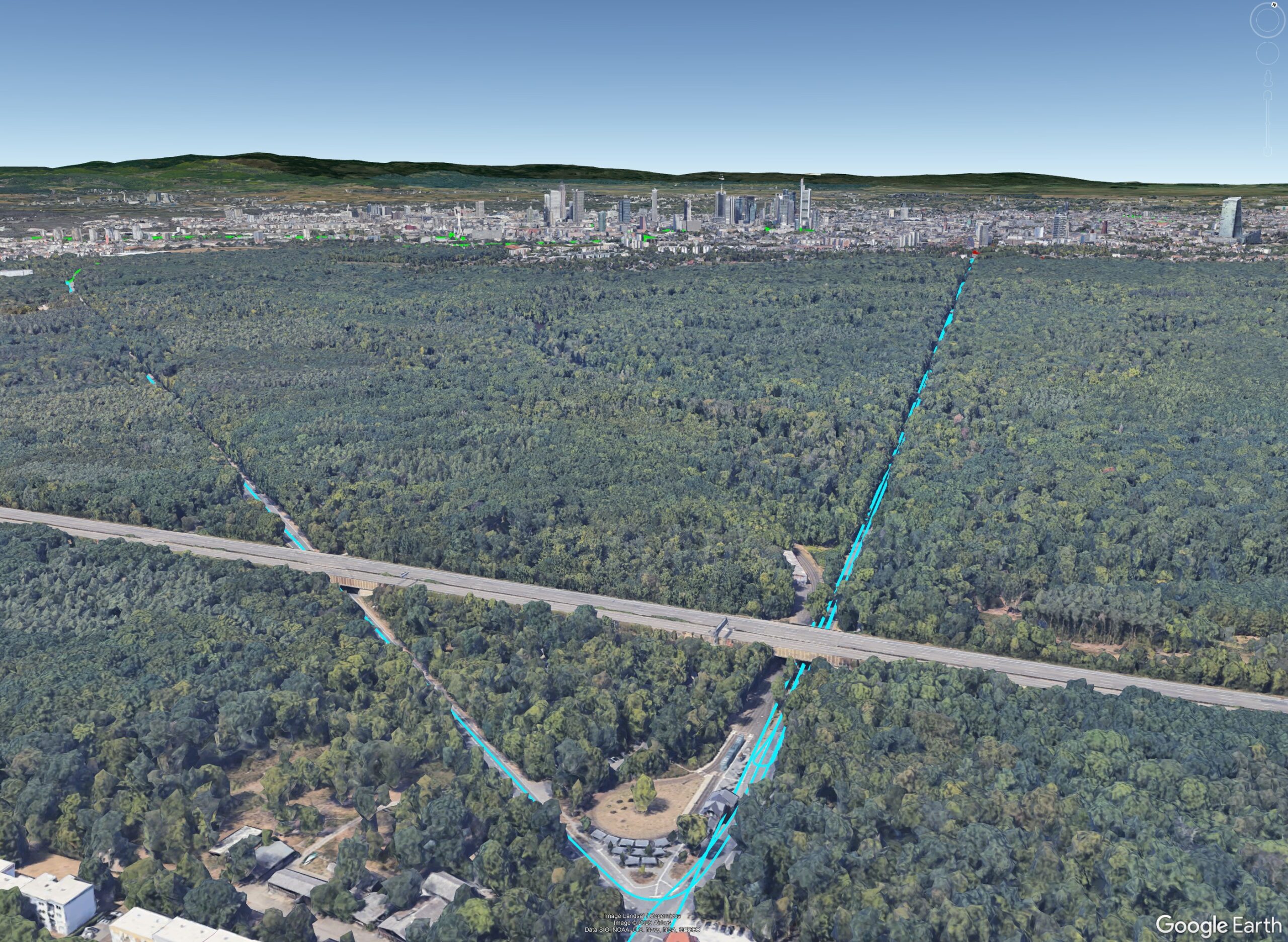
For this mini-series we use one consistent dataset: 20 drive logs, each close to one hour. We drove a normal passenger car in Darmstadt and Frankfurt through forest, city, dense residential, industrial zones, highway, and the high-rise/banking district. Hardware was a geodetic GNSS receiver (Javad Triumph-LS) and a MEMS IMU from ~2013 (Xsens MTi G-700). Processing uses AlgoNav’s tightly-coupled Network-PPK with our mobile VRS (MVRS), fused with IMU, odometry, and motion constraints. All five posts rely on these runs.
In dense forest the canopy is surprisingly hard on GNSS. Signals do not pass leaves and branches easily. When tree crowns even touch above the road, the receiver may see only a few satellites at any time.
There is one upside: vegetation has low reflectivity. So the signals we do receive are often cleaner (less multipath) than you might expect. The blocked ones are simply not tracked, or come with very low SNR, which a modern receiver marks as “unsafe”.
So, few satellites-but usable ones. Sounds manageable? Not the full story.
On a road inside dense forest, the antenna often “sees” only the sky along the road corridor. Trees block the sides. The result: most visible satellites line up in roughly one direction (forward/backward) plus overhead.
You can even have 10 satellites and still be in a weak geometry: along-track (forward/backward) and vertical are fine, but lateral (cross-track) is poorly observed. In matrix terms: the design matrix tells the truth-your solution is close to singular in that lateral direction.
Standard estimators handle bad geometry in theory. They inflate covariance where information is weak. So are we safe? Not quite.
Sometimes a side satellite “blinks” through the canopy for a few seconds. In principle, this one satellite suddenly makes the lateral direction observable again. Great-if it is trustworthy.
The problem: with our forest geometry we have redundancy in along-track and vertical, but not in lateral. If that side satellite is biased (bad code/carrier, residual multipath from a trunk, half-blocked antenna pattern), there is no second sideways measurement to cross-check it. A classic outlier test may not detect the bias, because there is not enough independent information in that direction.
This is where Minimum Detectable Bias (MDB) comes in. MDB asks: Given my current geometry, what is the smallest bias that I could still detect reliably?
In dense forest, the lateral MDB is often large. So a reliability-first algorithm may down-weight or even ignore that single side satellite even when it looks fine by classic tests-simply because, if it were wrong, we could not detect it.
Yes, that means we trade some availability (fewer fixes using that satellite) for stronger reliability (no hard lateral jumps).
A practical, conservative strategy in forest:
This way, the reported covariance may be a bit pessimistic in lateral during canopy segments-but the trajectory stays trustworthy, with fewer irrecoverable slips.
Typical forest segments show:
If your vehicles run in forests or tree-lined rural roads, expect stable along-track and vertical, but fragile lateral during dense canopy. A reliability-first approach-MDB-aware weighting, tightly-coupled GNSS/IMU, and careful acceptance of side glimpses-keeps maps and trajectories usable without hidden surprises.
This was Part 2 of our five-post series on tough GNSS environments:
If you have forest segments to share, we’re happy to compare geometry stats and MDB patterns. Next up: the European Urban Canyon-why two-to-three-story streets can behave like a miniature skyline.